





Wyzwania w zakresie komunikacji i bezpieczeństwa stojące przed producentami robotów mobilnych.
Roboty mobilne można spotkać wszędzie – od magazynów po szpitale – są nawet widoczne na ulicach. Ich popularność jest łatwa do zrozumienia; są tańsze, bezpieczniejsze, nie wymagają procesu rekrutacji i są bardziej produktywne niż pracownicy z krwi i kości. Rozwiązania robotycznej można łatwo skalować lub łączyć z innymi maszynami. Ponieważ roboty mobilne zbierają wiele danych w czasie rzeczywistym, firmy mogą je wykorzystać, aby rozpocząć swoją przygodę z IIoT.
Aby jednak działać wydajnie, roboty mobilne wymagają bezpiecznej i niezawodnej komunikacji. Artykuł ten przedstawia główne wyzwania związane z bezpieczeństwem i komunikacją przemysłową, przed którymi stają producenci robotów mobilnych oraz prezentuje łatwy sposób przezwyciężenia tych problemów pozwalający utrzymać je w ciągłym ruchu.
Czym są roboty mobilne?
Na początku zdefiniujmy, co rozumiemy pod pojęciem roboty mobilne.
Roboty mobilne transportują materiały z jednego miejsca do drugiego i występują w dwóch typach: jako zautomatyzowane pojazdy kierowane (AGV) i autonomiczne roboty mobilne (AMR). Pojazdy AGV wykorzystują infrastrukturę naprowadzającą (przewody , odbłyśniki lub paski magnetyczne), aby podążać ustalonymi trasami. Jeśli obiekt blokuje ścieżkę pojazdowi AGV to zatrzymuje się i czeka, aż obiekt zostanie usunięty.
Pojazdy AMR są bardziej dynamiczne. Poruszają się za pomocą map i wykorzystują dane z kamer, wbudowanych czujników lub skanerów laserowych do wykrywania otoczenia i wybierania najbardziej efektywnej trasy. Jeśli obiekt blokuje zaplanowaną trasę pojazdowi AMR, to obiera on inną drogę. Ponieważ wózki AMR nie są uzależnione od infrastruktury naprowadzającej, są szybsze w instalacji i mogą dostosowywać się do zmian logistycznych.
Jakie wyzwania w zakresie komunikacji i bezpieczeństwa stoją przed producentami robotów mobilnych?
1. Nawiązanie połączenia bezprzewodowego
Pierwszym wyzwaniem dla producentów robotów mobilnych jest wybór najbardziej odpowiedniej technologii bezprzewodowej. Zwykle polega to na ustaleniu wymagań, ocenie standardów i wybraniu najlepszego dopasowania. Niestety, nie zawsze jest to możliwe dla producentów pojazdów AGV/AMR, ponieważ często nie wiedzą oni, gdzie maszyna będzie zlokalizowana, ani jakie są dokładne szczegóły docelowego zastosowania.
Czasami połączenie Bluetooth będzie optymalne, ponieważ zapewnia stabilne połączenie bez przeciążeń, podczas gdy inne aplikacje będą wymagać szybkiego, bezpiecznego połączenia komórkowego. Dla producentów robotów mobilnych optymalna byłaby technologia sieciowa, którą można łatwo zmieniać w celu spełnienia określonych wymagań.
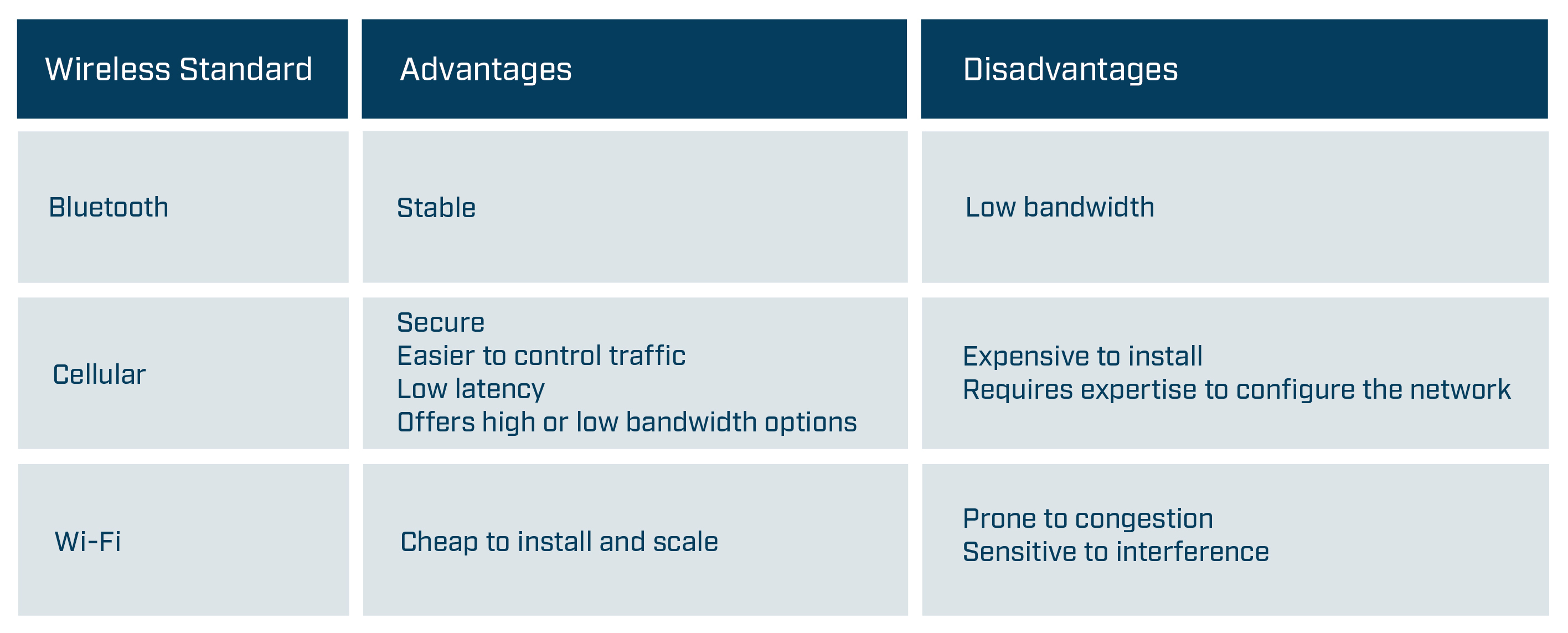 Rys.1 Standardy bezprzewodowe – główne zalety i wady
Rys.1 Standardy bezprzewodowe – główne zalety i wady
Drugim wyzwaniem jest zapewnienie działania instalacji zgodnie z planem. Przed wdrożeniem rozwiązania bezprzewodowego należy wykonać na miejscu ankietę predykcyjną w oparciu o rysunki obiektu, aby upewnić się, że zautomatyzowane pojazdy mają wystarczający zasięg sygnału w całej lokalizacji. Badanie terenu powinno określić optymalną lokalizację punktów dostępowych, właściwy typ anteny, optymalny kąt anteny oraz sposób ograniczenia zakłóceń. Po instalacji należy użyć bezprzewodowych narzędzi typu sniffer, aby sprawdzić projekt i dostosować punkty dostępowe lub antenę zgodnie z wymaganiami.
2. Łączenie robotów mobilnych z sieciami przemysłowymi
Roboty mobilne muszą komunikować się ze sterownikami w odpowiednim miejscu, mimo że często używają one różnych protokołów przemysłowych. Na przykład AGV może korzystać z CANopen, podczas gdy sterownik może korzystać z PROFINET. Ponadto producenci robotów mobilnych mogą chcieć użyć tego samego modelu AGV w innym miejscu, gdzie sterownik korzysta z innej sieci przemysłowej, takiej jak EtherCAT.
Producenci robotów mobilnych muszą również zadbać o to, aby ich wózki samojezdne miały wystarczającą wydajność do przetworzenia wymaganej ilości danych. Będzie się ona różnić w zależności od wielkości i rodzaju instalacji. Duże instalacje mogą wykorzystywać więcej danych, ponieważ algorytmy wyznaczania tras muszą obejmować większy obszar, więcej pojazdów i więcej potencjalnych dróg. Systemy nawigacyjne, takie jak nawigacja wizyjna, przetwarzają obrazy i dlatego wymagają większej mocy obliczeniowej niż instalacje korzystające z innych systemów nawigacyjnych, takich jak odbłyśniki czy taśmy magnetyczne. W rezultacie producenci robotów mobilnych muszą sprostać następującym wyzwaniom:
1. Potrzebują technologii sieciowej obsługującej wszystkie główne magistrale polowe i przemysłowe sieci Ethernet.
2. Zmiana technologii sieciowej musi być łatwa, aby robot mobilny mógł komunikować się bez modyfikacji konstrukcji sprzętu w tej samej sieci przemysłowej, co sterownik.
3. Zastosowana technologia sieciowa musi zapewnić wystarczającą wydajność i funkcjonalność do przetwarzania wymaganych ilości danych.
3. Tworzenie bezpiecznego systemu
Stworzenie systemu, w którym roboty mobilne mogą bezpiecznie transportować materiały ma znaczenie kluczowe i jest zadaniem wymagającym. Producenci robotów mobilnych muszą stworzyć system uwzględniający wszystkie różnorodne typy i konstrukcje robotów mobilnych oraz obecność ludzi w środowisku przemysłowym. Muszą upewnić się, że roboty mobilne reagują na działania zewnętrzne, takie jak otwarcie drzwi bezpieczeństwa lub naciśnięcie przycisku zatrzymania awaryjnego, oraz że rozwiązanie sieciowe może przetwarzać różne protokoły bezpieczeństwa i interfejsy. Muszą wziąć pod uwagę, że pojazdy AMR poruszają się swobodnie i odpowiednio zarządzać ryzykiem kolizji. Technologia stosowana w czujnikach stale ewoluuje, a producenci pojazdów AGM/AMR muszą nadążać za rozwojem, by mieć pewność, że ich produkty pozostają tak wydajne, jak to tylko możliwe.
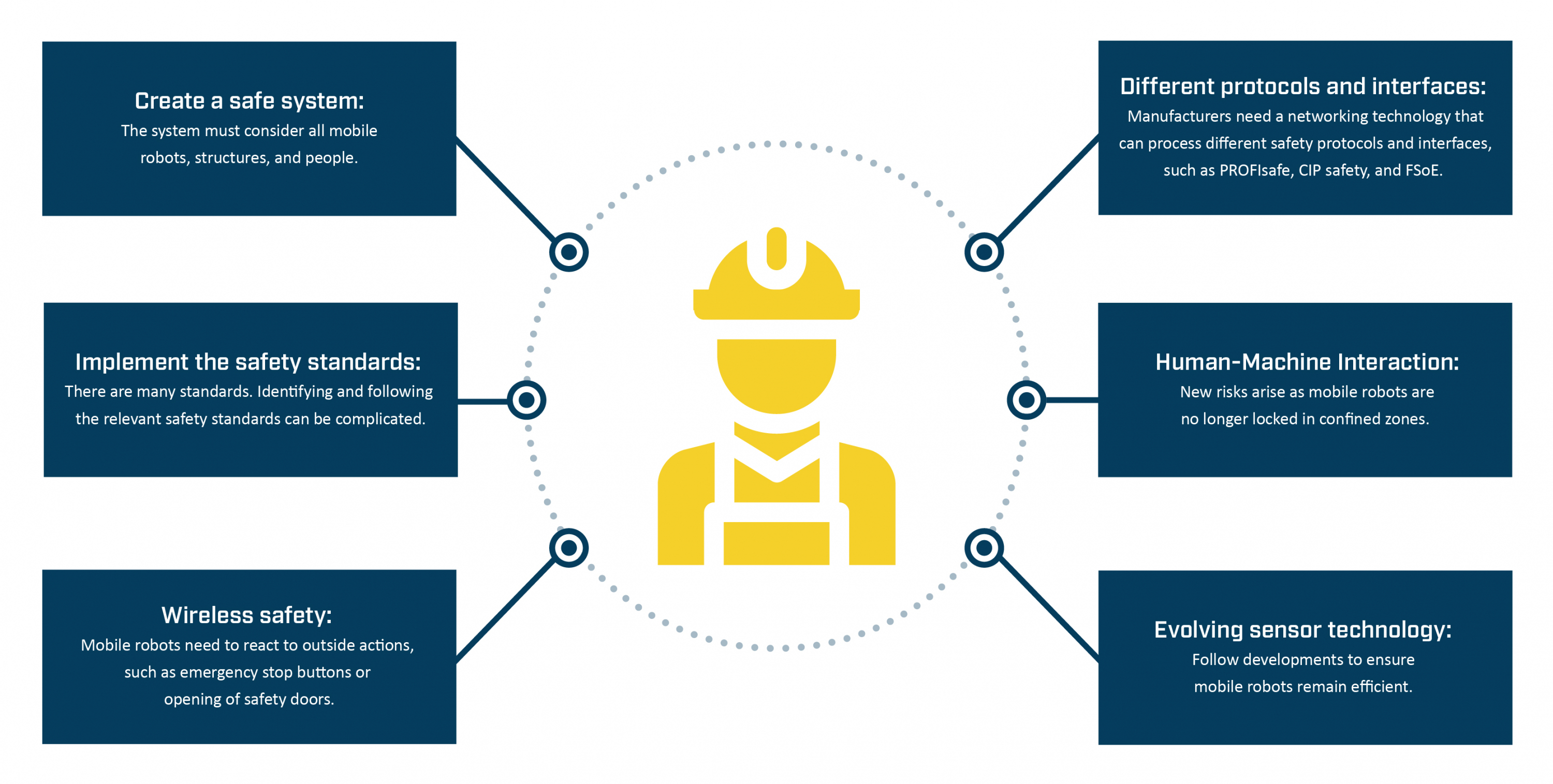 Rys. 2. Przegląd wyzwań związanych z bezpieczeństwem dotyczących producentów robotów mobilnych
Rys. 2. Przegląd wyzwań związanych z bezpieczeństwem dotyczących producentów robotów mobilnych
Standardy bezpieczeństwa.
Normy bezpieczeństwa zawierają wytyczne dotyczące wdrażania elementów związanych z bezpieczeństwem oraz przygotowania środowiska pracy i konserwacji maszyn lub urządzeń
Chociaż zgodność z różnymi normami bezpieczeństwa (ISO, DIN, IEC, ANSI itp.) jest w większości dobrowolna, konstruktorzy maszyn w Unii Europejskiej są prawnie zobowiązani do przestrzegania norm bezpieczeństwa zawartych w dyrektywach maszynowych. Dyrektywa maszynowa 2006/42/WE ma zawsze zastosowanie w przypadku producentów robotów mobilnych, a w niektórych sytuacjach może mieć również znaczenie dyrektywa 2014/30/UE, ponieważ reguluje ona kompatybilność elektromagnetyczną sprzętu. Dyrektywa maszynowa 2006/42/WE opisuje wymagania dotyczące projektowania i budowy bezpiecznych maszyn wprowadzanych na rynek europejski. Producenci mogą umieszczać oznakowanie CE i dostarczać maszyny swoim klientom tylko wtedy, gdy są w stanie udowodnić w deklaracji zgodności, że spełnili wymagania dyrektywy.
Chociaż inne normy bezpieczeństwa nie są obowiązkowe, producenci powinni ich przestrzegać, ponieważ pomagają one spełnić wymagania dyrektywy maszynowej 2006/42/WE. Na przykład mogą postępować zgodnie z wytycznymi zawartymi w normie ISO 12100, aby zredukować zidentyfikowane ryzyko do akceptowalnego poziomu ryzyka szczątkowego. Mogą korzystać z ISO 13849 lub IEC 62061, aby znaleźć
wymagany poziom bezpieczeństwa dla każdego ryzyka i upewnić się, że odpowiednia funkcja związana z bezpieczeństwem spełnia określone wymagania. Producenci robotów mobilnych decydują, w jaki sposób osiągają określony poziom bezpieczeństwa. Są w stanie m.in. zmniejszyć prędkość robotów mobilnych, aby obniżyć ryzyko kolizji i stopień obrażeń do akceptowalnego poziomu. Mogą też zapewnić, że roboty mobilne będą działać tylko w wydzielonych strefach, do których dostęp dla ludzi jest zabroniony (określonych jako strefy zamknięte w normie ISO 3691-4).
Określenie właściwych standardów i wdrożenie wymagań to najlepszy sposób, w jaki producenci wózków samojezdnych mogą stworzyć bezpieczny system. Jednak jak sugeruje to podsumowanie, jest to skomplikowany i czasochłonny proces
4. Zapewnienie niezawodnej komunikacji CAN
Stanowiąc niezawodny i łatwy do wdrożenia standard od lat 80-tych, ten rodzaj komunikacji oparty na technologii CAN wciąż zyskuje na popularności, głównie ze względu na jej zastosowanie w różnych dynamicznie rozwijających się branżach, takich jak E-Mobility i bateryjne systemy magazynowania energii (BESS). CAN to proste, energooszczędne i ekonomiczne rozwiązanie. Wszystkie urządzenia w sieci mają dostęp do każdej informacji, a ponieważ jest to otwarty standard, oznacza to, że użytkownicy mogą dostosowywać i rozszerzać komunikaty do swoich potrzeb.
Dla producentów robotów mobilnych ustanowienie połączenia CAN staje się jeszcze ważniejsze, ponieważ umożliwia to monitorowanie akumulatorów litowo-jonowych coraz częściej stosowanych w układach napędowych wózków samojezdnych, zarówno w systemach modernizowanych, jak i w nowych instalacjach. W tym celu producenci muszą wykonać następujące czynności:
1. Nawiązać niezawodne połączenie ze standardami komunikacji CAN lub CANopen, co umożliwi im sprawdzenie swoich urządzeń, np. pod kątem monitorowania stanu i wydajności baterii.
2. Zapewnić systemom ochronę przed zakłóceniami elektromagnetycznymi (EMI), ponieważ mogą one zniszczyć zainstalowaną elektronikę. Ryzyko EMI jest istotne w przypadku modernizacji, ponieważ dodanie nowych komponentów, takich jak bateria umiejscowiona obok kabla komunikacyjnego, powoduje wprowadzenie zakłóceń elektromagnetycznych o wysokiej częstotliwości.
5. Zdalny dostęp do robotów mobilnych
Możliwość zdalnego dostępu do systemu sterowania maszyny może pomóc dostawcom robotów mobilnych lub inżynierom w rozwiązaniu większości problemów bez konieczności podróżowania na miejsce.
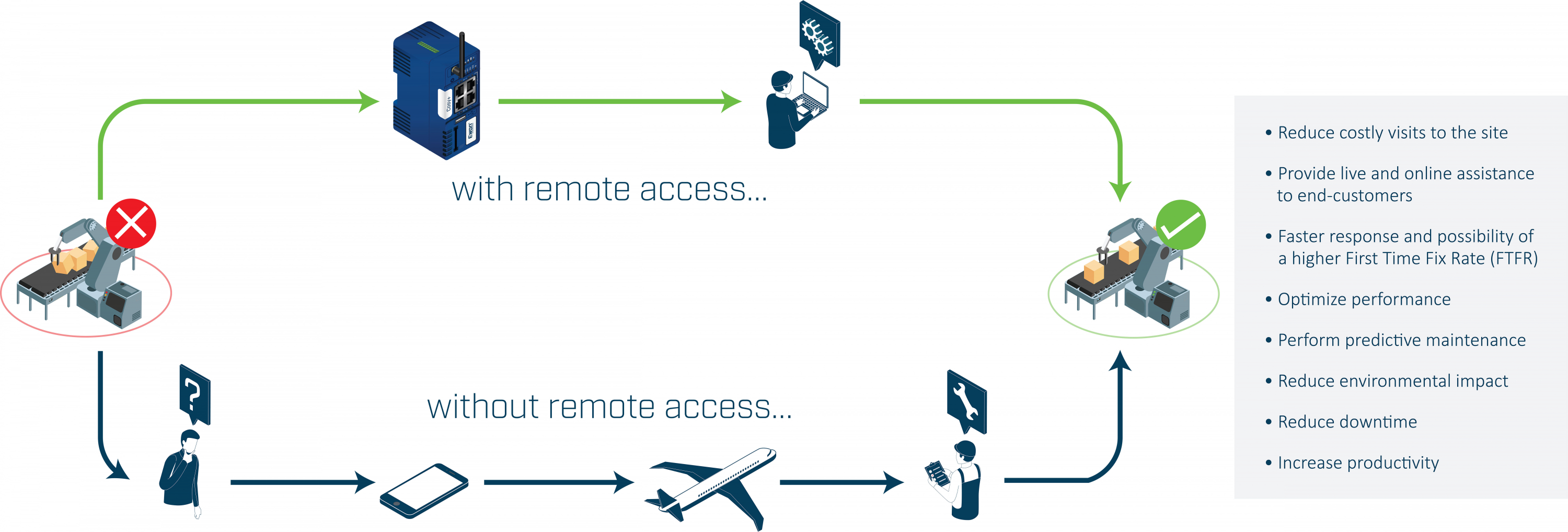 Rys. 3. Korzyści z rozwiązania zdalnego dostępu
Rys. 3. Korzyści z rozwiązania zdalnego dostępu
Wyzwaniem jest stworzenie takiego rozwiązania zdalnego dostępu, które zrównoważy wymagania działu IT z oczekiwaniami inżynierów lub dostawców.
Dział IT chce mieć pewność, że sieć pozostaje bezpieczna, niezawodna i zachowuje integralność. W rezultacie rozwiązanie zdalnego dostępu powinno zawierać następujące rodzaje zabezpieczeń:
- Używanie połączeń wychodzących zamiast połączeń przychodzących, w celu zminimalizowania wpływu na zaporę
- Oddzielenie istotnego ruchu od reszty sieci.
- Szyfrowanie i ochrona całego ruchu w celu zapewnienia jego poufności i integralności. Zagwarantowanie, że dostawcy działają zgodnie z odpowiednimi normami bezpieczeństwa, takimi jak ISO 27001, lub że są certyfikowani na zgodność z nimi
- Zagwarantowanie przeprowadzania przez dostawców regularnych audytów bezpieczeństwa.
Inżynier lub dostawca chcą prostego w użyciu i niezawodnego systemu. Użytkownicy powinni mieć możliwość łatwego połączenia z robotami mobilnymi i uzyskiwania dostępu do wymaganych informacji. Jeśli instalacja może ulec zmianie, liczba robotów powinna być łatwa do skalowania zgodnie z wymaganiami. Jeśli roboty mobilne znajdują się w innym kraju niż dostawcy lub inżynierowie, infrastruktura sieciowa musi zapewniać wystarczające pokrycie i nadmiarowość, aby zagwarantować dostępność na całym świecie.
Podsumowanie
Jak podkreślono wyżej, producenci robotów mobilnych muszą sprostać wielu wyzwaniom związanym z komunikacją i bezpieczeństwem sieciowym. Muszą ustanowić połączenie bezprzewodowe, przesyłać dane przez różne sieci, zapewnić bezpieczeństwo, połączyć się z systemami CAN i posiadać bezpieczny dostęp zdalny do robotów. Jakby nie było to wystarczająco skomplikowane, każda instalacja musi zostać ponownie oceniona i dostosowana do wymagań na miejscu.
Najlepsze praktyki wdrażania systemów komunikacji z robotami mobilnymi
Producenci robotów mobilnych rzadko są ekspertami w dziedzinie komunikacji lub bezpieczeństwa. W konsekwencji może się okazać, że samodzielne opracowanie wymaganej technologii komunikacyjnej będzie dla nich zbyt czasochłonne i kosztowne. Wykorzystanie specjalnie zaprojektowanych rozwiązań komunikacyjnych innych firm nie tylko rozwiązuje problemy komunikacyjne, ale zapewnia również dalsze korzyści.
Nowoczesne rozwiązania komunikacyjne mają konstrukcję modułową, która umożliwia producentom robotów mobilnych usunięcie jednego produktu sieciowego zaprojektowanego dla konkretnego standardu lub protokołu i zastąpienie go produktem zaprojektowanym dla innego standardu lub protokołu bez wpływu na jakąkolwiek inną część maszyny. Na przykład Bluetooth może być najbardziej odpowiednim standardem bezprzewodowym w jednej instalacji, podczas gdy Wi-Fi może zapewnić lepszy zasięg w innej instalacji. Podobnie, jedna lokalizacja może wykorzystywać protokoły PROFINET i PROFIsafe, podczas gdy inna może wykorzystywać odmienne protokoły przemysłowe i bezpieczeństwa. W obu scenariuszach producenci robotów mobilnych mogą wykorzystywać produkty komunikacyjne do zmiany technologii sieciowej w celu spełnienia lokalnych wymagań bez wprowadzania jakichkolwiek zmian w projekcie sprzętu.